Micromouse is an event where small robot mice solve a 16×16 maze. It began in the late 1970s. Events are
held worldwide, and are most popular in the UK, U.S., Japan and in 2021 we had a chance to participate as
a local competition was held in Egypt-Japan University of Science and Technology.
The maze is made up of a 16×16 grid of cells, each 180 mm square with walls 50 mm high. The mice are
completely autonomous robots that must find their way from a predetermined starting position to the
central area of the maze unaided. The mouse needs to keep track of where it is, discover walls as it
explores, map out the maze and detect when it has reached the goal. Having reached the goal, the mouse
will typically perform additional searches of the maze until it has found an optimal route from the start
to the finish. Once the optimal route has been found, the mouse will run that route in the shortest
possible time.
When working on the project, We divided ourselves to 3 teams:
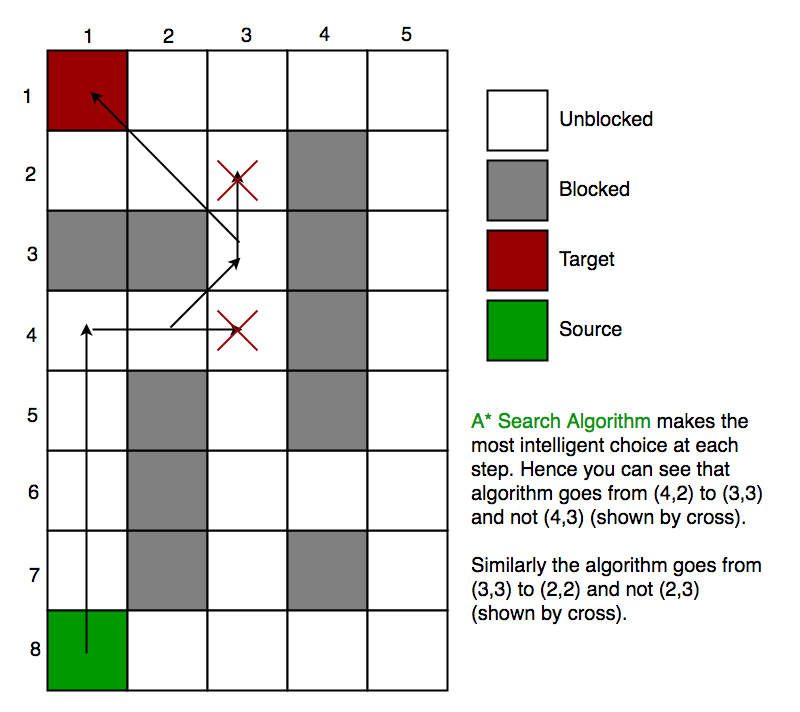
- Control Team: Responsible for coding
the Algorithm to solve the maze and the drivers for the AVR controller we used and making sure the
algorithm will not only solve the maze but do it as fast as possible.
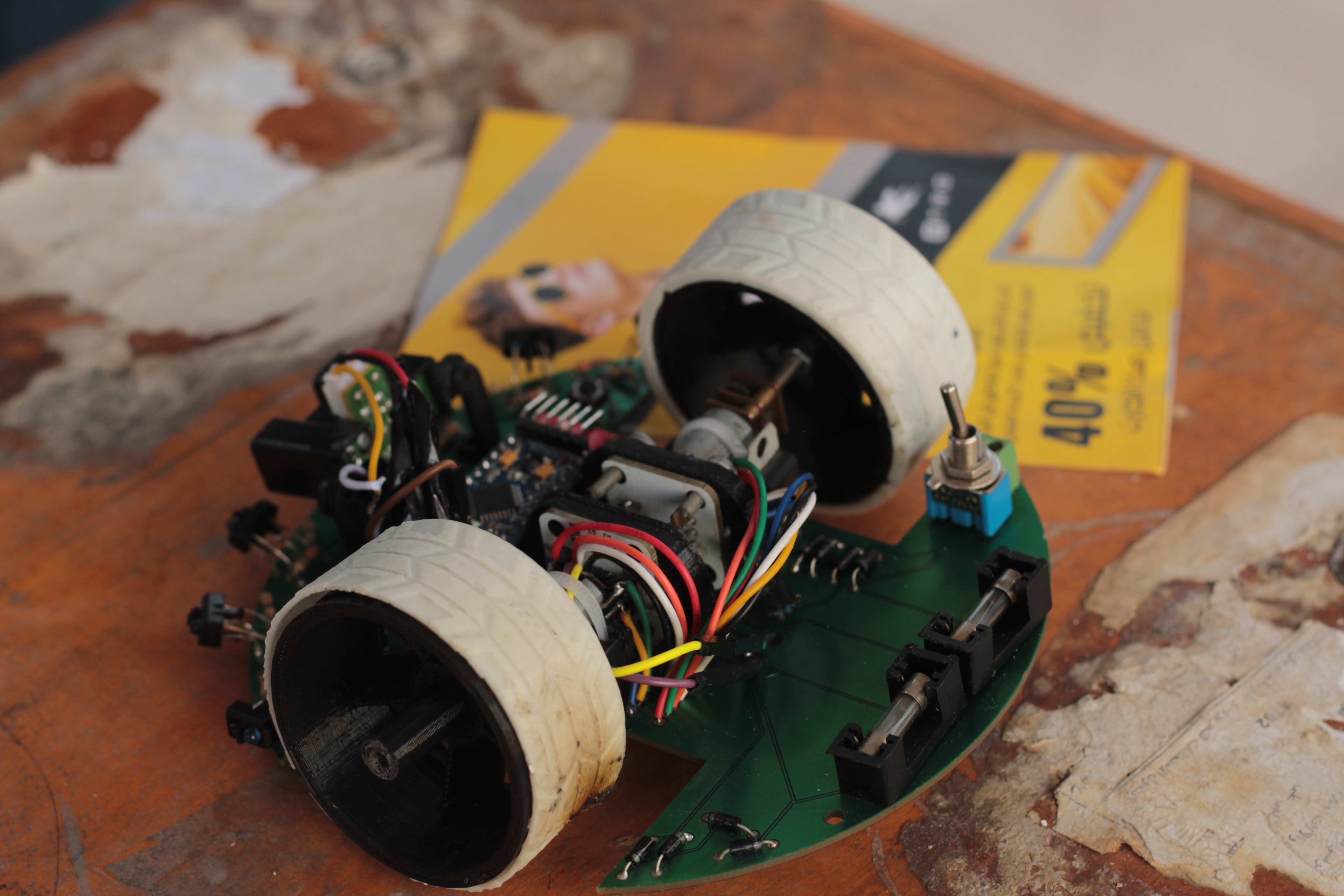
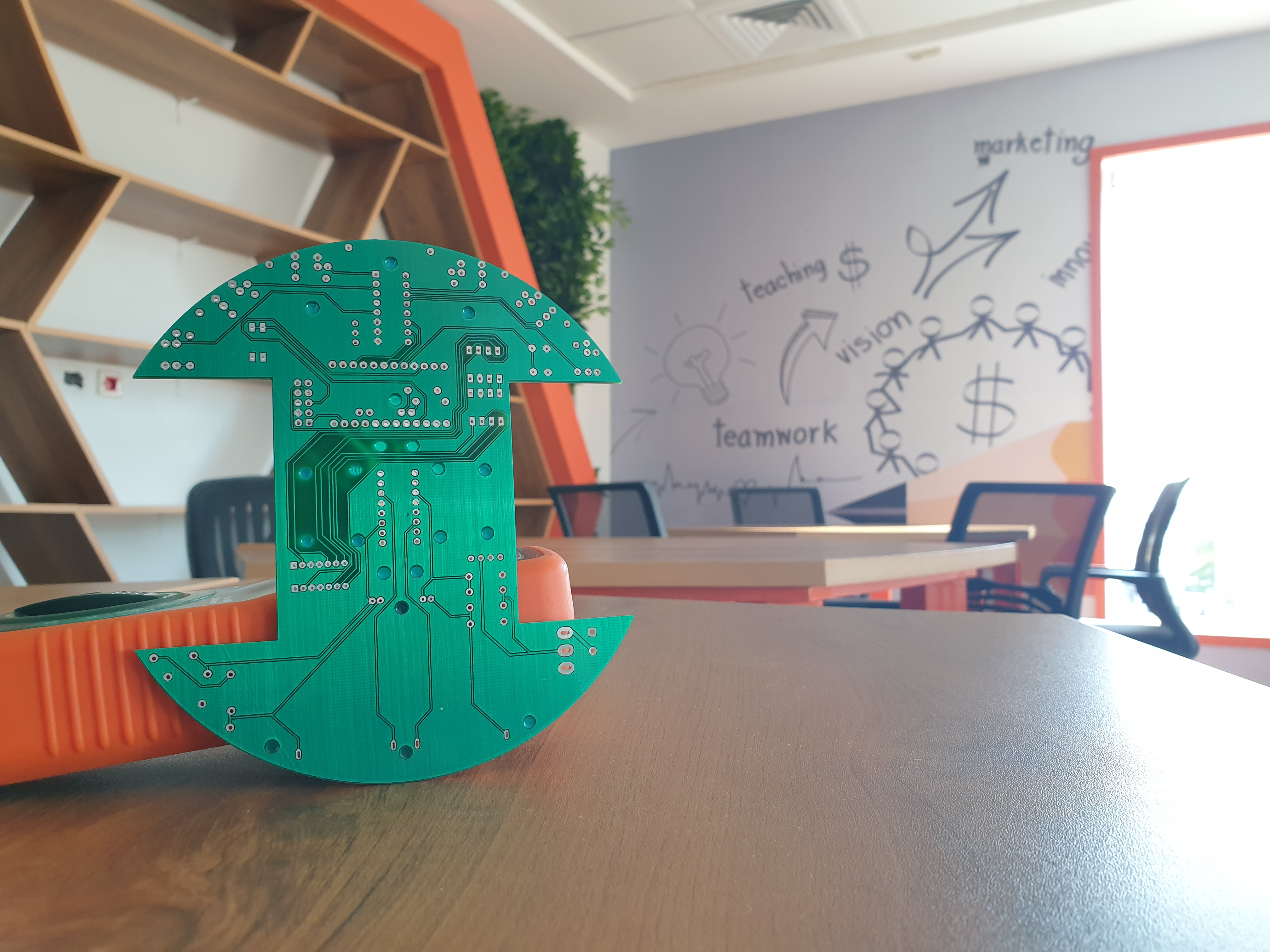
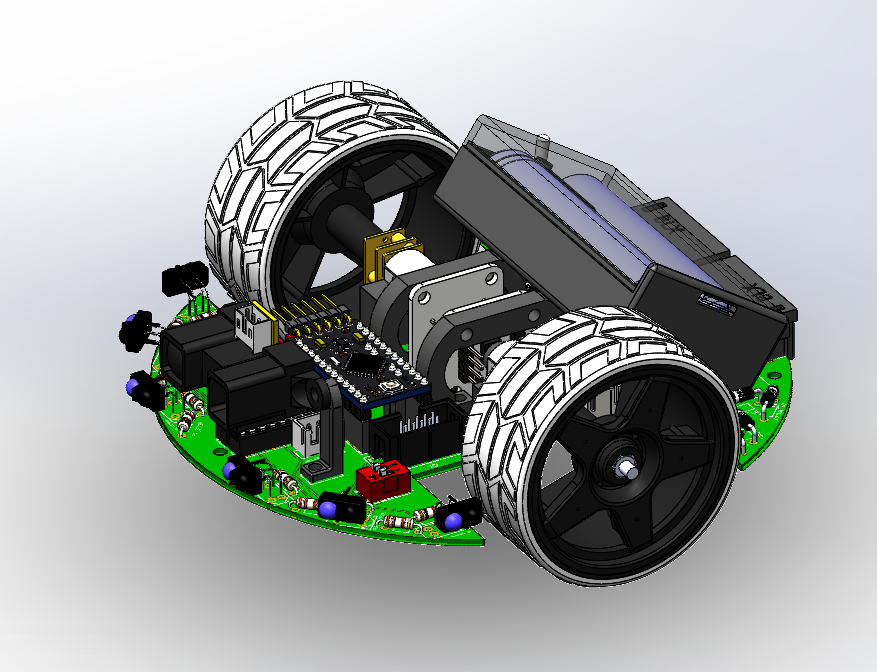
- Hardware Team: Responsible
for deciding all the components of the system and designing the PCB of the robot while making sure it
doesn't exceed the maximum size 15*15 cm2.
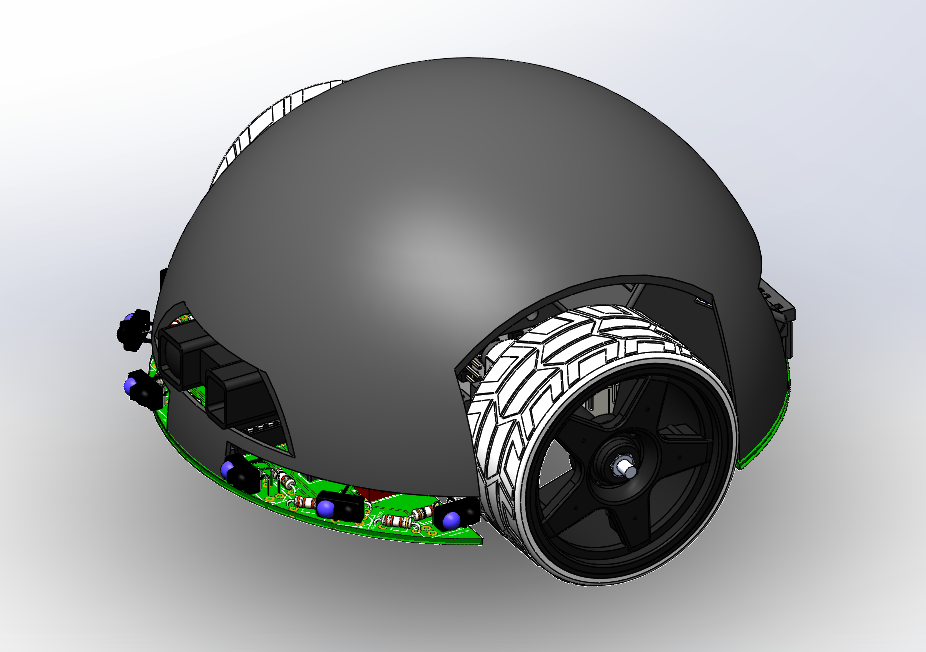
- Mechanical Team: Responsible for designing the
mechanical frame and choosing the motors and wheels while making sure the robot is rigid yet light and can
go fast.